





- Mecânica
- /
- Estática
- /
- Momento de Força
O momento de uma força é a medida da tendência de um corpo girar em torno de um eixo devido a aplicação de uma força.
Momento de uma força
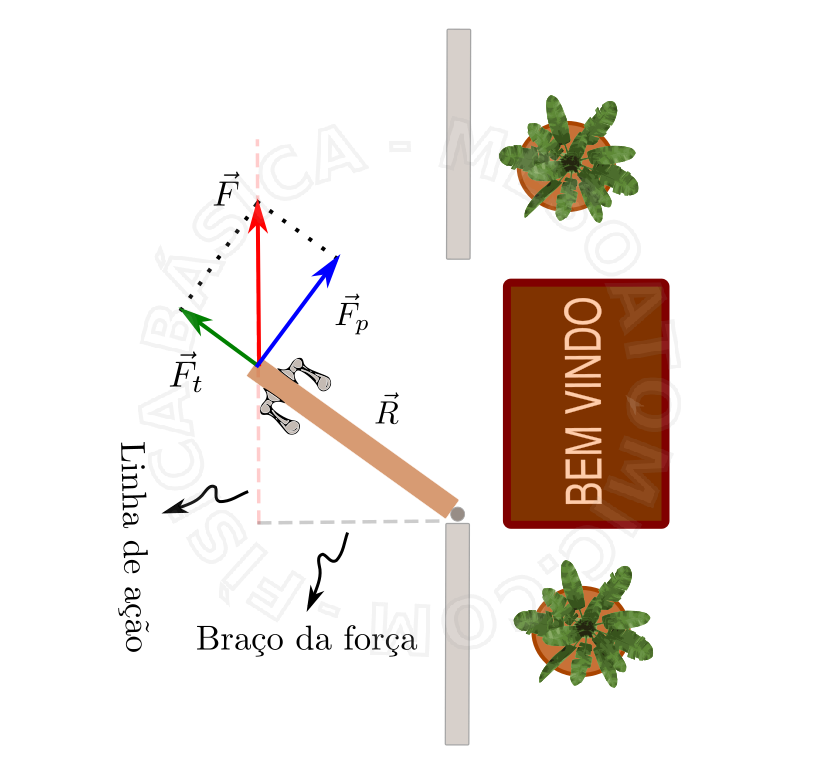
A figura acima ilustra uma força atuando sobre uma porta. Dependendo de como ela é aplicada, pode fazer a porta rotacionar com mais facilidade. Para análise deste tipo de problema, as seguintes grandezas são importantes:
- Braço de uma força \((b)\)
- Dado um eixo de rotação, o braço de uma força \(b\) é a menor distância entre o eixo de rotação e a linha de ação da força.
- Momento de uma força \((M)\)
- O valor algébrico do momento de uma força, ou torque, é dado pela expressão: $$M = \pm F d,$$ onde, \(F\) é a magnitude da forca aplicada ao corpo e \(d\) é o braço dessa força relativa ao eixo dado.
É adotada a seguinte convenção de sinais : Quando \(F\) tende a girar o corpo no sentido anti-horário o torque tem sinal positivo \((+)\) , quando \(F\) tende a girar o corpo no sentido horário o torque tem sinal negativo \((-)\) ,
Momento de uma força em relação a um eixo \(o\)
É possível definir o momento de uma força através da seguinte equação vetorial: $$ \vec{M}_o = \vec{R} \times \vec{F},$$ onde \(\times\) é o produto vetorial entre a força \(\vec{F}\) e o vetor posição da força, \(\vec{R}\) , em relação ao eixo \(o\) . De forma equivalente, é possivel escrever um produto vetorial como: $$ M = F sen(\theta) R,$$ onde \(\theta\) é o menor ângulo entre \(\vec{F}\) e \(\vec{R}\) . A figura acima ilustra estes vetores, onde o vetor \(R\) tem direção que coincide com a porta e origem no eixo de rotação da mesma.
Há uma convenção para a direção do vetor \(\vec{M}\) , como deixa claro o produto vetorial, ele é sempre ortogonal ao plano de rotação do sistema, e será positivo ou negativo de acordo com a direção da rotação, convenção já citada acima. Ou seja, para uma uma rotação no sentido horário, o vetor momento da força aponta para dentro do plano de rotação, no caso de um movimento anti-horário, o vetor aponta para fora do plano de rotação.
Momento resultante
O momento resultante de um sistema de forças em relação a um eixo é igual a soma dos momentos das forças constituintes do sistema, em relação ao mesmo eixo, ou seja: $$ \vec{M}_r = \sum_i^n \vec{M}_i $$ Se o momento resultante das forças que atuam em um corpo rígido é zero, ele não possui aceleração rotacional, ou ele está girando com velocidade angular constante ou está parado. De forma matemática: $$ \vec{M}_r = \sum_i^n \vec{M}_i = \vec{0} $$ quando não há aceleração rotacional do corpo.
Binário

Binário é o sistema constituído por duas forças de mesma intensidade e direção, mas com sentidos opostos e linhas de ação diferentes, como ilustra o malabares na figura acima, onde \(|\vec{F}_1|=|\vec{F}_2|=F\) . Para este sistema vale o seguinte:
- A forca resultante de um binário é nula, logo, não há translação do corpo.
- Um binário tende a produzir apenas uma rotação no corpo em que é aplicado.
- Um binário só pode ser equilibrado por outro binário de sentido oposto.
- A soma dos momentos de suas forças é constante e independe de qualquer centro de momento escolhido.
O torque para o binário é \( M = 2F \frac{L}{2} = FL\) , onde \(L\) é o comprimento do corpo. Neste caso \(d=\frac{L}{2}\) , pois na ausência de um eixo fixo os corpos rotacionam em relação ao seu centro de massa.




