





- Mecánica
- /
- Cinemática
- /
- Cinemática vectorial
Cuando el movimiento se da en dos dimensiones o más, es necesario trabajar con vectores, es decir, se debe utilizar la cinemática vectorial. Un ejemplo de movimiento en dos dimensiones es un coche que describe una trayectoria circular.
Cinemática vectorial
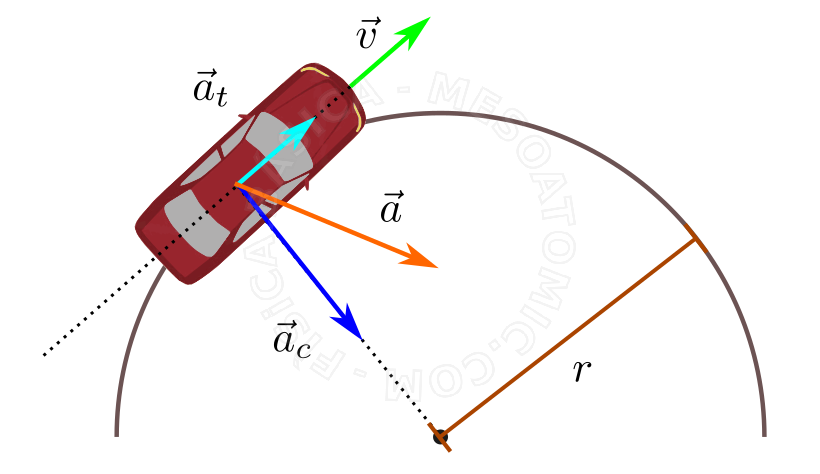
La figura de arriba ilustra los vectores presentes en un movimiento de dos dimensiones (trajectoria circular), que puede ser entendido como sigue:
- Vector velocidad \((\vec{v})\)
- El vector de velocidad siempre tiene la dirección de la recta tangente a la trayectoria en el punto donde se encuentra el móvil y con la dirección del movimiento.
- Vector de aceleración tangencial \((\vec{a_t})\)
- Es el componente de aceleración que indica la variación del módulo de la velocidad y siempre tiene la misma dirección de la velocidad. En el caso de un movimiento acelerado, \( \vec{a_t} \) tienen el mismo sentido de la velocidad y en el caso de desaceleración, \( \vec{a_t} \) tiene dirección opuesta a la velocidad.
- Vector de aceleración centrípeta \((\vec{a_c})\)
- Es la componente de aceleración que cambia la dirección de la velocidad, tiene dirección e sentido apuntando hacia el centro de la trayectoria desde la posición móvil. El módulo de esta aceleración en un instante dado es $$ a_c = \frac{v^2}{r} $$ donde \(v\) es el módulo de velocidad y \(r\) es el radio de curvatura de la trayectoria el instante considerado.
- Resultante del vector de aceleración \((\vec{a})\)
- Es la suma de todas las aceleraciones que actúan sobre el cuerpo. Vectorialmente \( \vec{a} = \vec{a}_t +\vec{a}_c \) , algebraicamente \( a^2 = a_t^2 + a_c^2 \) .




